篇首语:本文由编程笔记#小编为大家整理,主要介绍了CUDA编程之GEMM优化相关的知识,希望对你有一定的参考价值。
最近由于工作需要,研究了一下CUDA编程中的GEMM的优化,主要是学习了GEMM优化的常用方法,同时自己也利用了常用优化方法动手实现了一遍GEMM优化。学习过程中主要参考了CUTLASS官方博客,网上也有中文翻译版本,里面有些地方翻译的可能不是很准确,在阅读中文版本的时候最好能对照原文看一下,在学习过程中还参考了网上的其他一些资料:
这篇文章主要想谈谈自己对GEMM优化的一些理解。
由于本文的所有示例代码都是基于Matrix类来设计的,所以这里有必要先讲一下Matrix类的设计。
在自己手动实现GEMM优化的时候,发现一个问题:由于GEMM优化的时候需要对block和thread分块,这样就会涉及到大量子块以及子块元素索引的计算,很容易出错,为了简化索引的计算和提高可读性,设计了Matrix这个类型。
在设计Matrix类的时候,我参考了Pytorch的Tensor的设计思想,Pytorch的作者在一篇博客中详细介绍了Tensor的设计思想,我们都知道Pytorch中的Tensor类型不保存实际的数据,也就意味着Tensor不负责实际数据的分配和释放,真实数据的分配和释放是由Storage这个类型来操作的,Tensor只是实际数据的一个逻辑视图(view)。下图来自那篇博客,图中很清楚的说明了Tensor和Storage的关系。
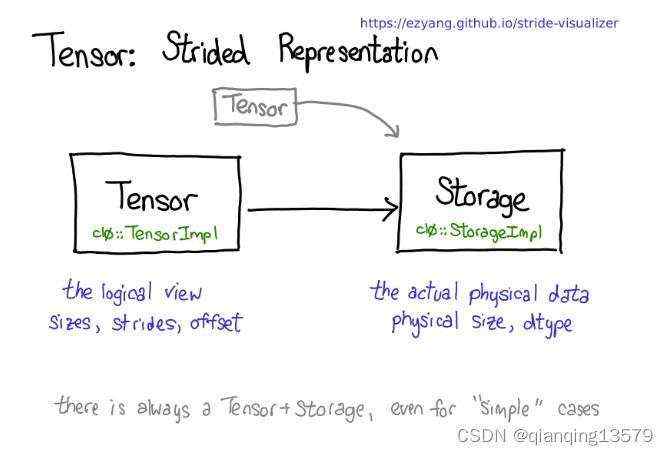
基于Pytorch的设计思想,Matrix类也被设计成了Tensor一样的机制,也就是Matrix不保存实际的内存数据,Matrix只是实际数据的一个视图(view)。Matrix除了拥有一个数据指针外,还具有两个重要的属性:size和stride。通过这两个属性,我们就可以很方便的访问矩阵数据了。下面我们看一下Matrix的视图机制是如何实现数据访问的。
下图表示内存中的一个4行6列的二维数组,该数组按照行主序的方式在内存中连续存储(与C语言中的数组一致),所以在列这个维度上步长为1,在行这个维度上的步长为6。

现在我们要从该数组中获取一个4行3列的一个子数组,如下图所示:

下面我们可以利用视图完成该操作。

我们让视图的数据指针指向原始数据的第3个元素(原始数组下标为2的元素),然后设置视图的size为[4,3],stride为[6,1]。如果我们要访问该子矩阵索引为(1,1)的元素(下图红色元素),则其内存索引为二维索引与stride的内积,即16+11=7,通过将data pointer移动7次就可以访问到该元素了。

通过上面对视图的介绍,我们可以看出通过视图机制,我们可以不用拷贝子数组的数据就可以很方便的访问该子数组。
下面看一下Matrix的具体代码实现
template
class Matrix
public:
__device__ __host__ Matrix() = default;
__device__ __host__ Matrix(const Matrix &) = default;
__device__ __host__ Matrix& operator=(const Matrix &) = default;
__device__ __host__ Matrix(T *_data,int _rows,int _cols,int _strideOfRow,int _strideOfCol):
data(_data),
rows(_rows),
cols(_cols),
strideOfRow(_strideOfRow),
strideOfCol(_strideOfCol)
// 返回该矩阵所有字节数
constexpr __device__ __host__ int GetNumberOfBytes() const
return rows*cols*sizeof(T);
// 返回该矩阵元素个数
constexpr __device__ __host__ int GetNumberOfElements() const
return rows*cols;
// 访问某个元素,该元素的索引为二维逻辑索引:(rowIndex,colIndex)
__device__ __host__ float &operator()(int rowIndex,int colIndex)
// 计算内存索引
int memoryIndex=rowIndex*strideOfRow+colIndex*strideOfCol;
return data[memoryIndex];
// 访问某个元素,该元素的索引为一维逻辑索引:(Index)
__device__ __host__ float &operator()(int index)
// 转换为二维逻辑索引
int colIndex=index%cols;
int rowIndex=index/cols;
// 计算内存索引
int memoryIndex=rowIndex*strideOfRow+colIndex*strideOfCol;
return data[memoryIndex];
public:
T *data = nullptr; // 数据指针
int rows = 0;// 矩阵的行数
int cols = 0;// 矩阵的列数
int strideOfRow = 0;// 行步长
int strideOfCol = 0;// 列步长
;
有了Matrix这个类,我们就可以方便的访问子矩阵的元素了。前面提到的示例可以通过下面的代码来实现,其中矩阵b就表示a中黄色部分的子矩阵。
Matrix<float> a;
Matrix<float> b(a.data&#43;2,4,3,a.strideOfRow,a.strideOfCol );// a矩阵的一个4行3列的子矩阵
a(1,1)&#61;0;// 访问索引为(1,1)的元素&#xff0c;实际访问的时候&#xff0c;会转换为内存索引7&#xff0c;然后通过data[7]访问到实际的元素
介绍了Matrix的设计之后&#xff0c;下面我们来看一下GEMM优化。由于学习过程中主要参考了CUTLASS官方博客&#xff0c;所以本文的GEMM优化思路与这篇博客基本相同。
在高性能计算领域&#xff0c;矩阵乘&#xff08;GEMM&#xff09;的优化是一个非常重要的课题。GEMM可以非常广泛地应用于航空航天、流体力
学及深度学习领域。GEMM的计算公式如下&#xff1a;
C
&#61;
a
l
p
h
a
A
∗
B
&#43;
b
e
t
a
C
C&#61;alphaA*B&#43;betaC
C&#61;alphaA∗B&#43;betaC

其中A是一个M x K的矩阵&#xff0c;B是一个K x N的矩阵&#xff0c;C是一个M x N的矩阵&#xff0c;alpha和beta是标量。
为了简化计算&#xff0c;本文中设置alpha&#61;1.0,beta&#61;0。上述公式变为&#xff1a;
C
&#61;
A
∗
B
C&#61;A*B
C&#61;A∗B
对于GEMM计算&#xff0c;我们很容易想到如下的实现&#xff1a;
__global__ void NaiveGEMM(Matrix<float> A,Matrix<float> B,Matrix<float> C)
// 获取线程在网格内的索引
int row &#61; blockIdx.y * blockDim.y &#43; threadIdx.y;// 行
int col &#61; blockIdx.x * blockDim.x &#43; threadIdx.x;// 列
// 每个线程计算矩阵C的一个元素
if(row<C.rows&&col<C.cols)
float c &#61; 0;
for (int i &#61; 0; i < A.cols; &#43;&#43;i)
c &#43;&#61; A(row,i)*B(i,col);// 使用A的第row行乘以B的第col列
C(row,col) &#61; c;
这种实现中&#xff0c;每个线程使用A的一行和B的一列计算矩阵C中的一个元素。这种实现存在如下问题&#xff1a;访存开销太大&#xff0c;A和B矩阵的全局内存被访问了多次&#xff0c;其中A矩阵被访问了N次&#xff0c;B矩阵被访问了M次。下面我们以这个实现为baseline来进行GEMM的优化。
NaiveGEMM的主要问题在于访存开销太大&#xff0c;所以下面我们主要的优化点就是要减少访存&#xff0c;其实很容易想到的思路就是利用共享内存(Shared Memory)&#xff0c;基本思路就是将每个block需要的A矩阵的部分和B矩阵的部分先读取到共享内存中&#xff0c;然后再计算&#xff0c;这样每次只需要读取一次全局内存就可以了&#xff0c;但是这里有个问题就是由于共享内存的容量是非常有限的&#xff0c;如果矩阵A和矩阵B规模比较大&#xff0c;则无法一次性全部加载到共享内存&#xff0c;所以我们需要分批加载。如下图所示&#xff0c;在计算C矩阵的绿色子块的时候&#xff0c;加载A和B矩阵的时候&#xff0c;沿着K维度每次只加载下图中1和2大小的子块。

所以GEMM优化的第一步就是Block分块&#xff1a;每个Block负责计算C矩阵的一个子块&#xff0c;每次计算子块的时候&#xff0c;沿着K维度分批将A和B加载到共享内存中计算乘累加。
与NaiveGEMM一样&#xff0c;这种实现方式每个线程还是负责block中一个元素的计算。通过Block分块&#xff0c;可以显著减少对全局内存的访问次数。假设每个Block的行大小为BM,列大小为BN,则优化后A矩阵被访问N/BN次&#xff0c;B矩阵被访问了M/BM次。
代码实现如下&#xff1a;
__global__ void BlockGEMM_V1(Matrix<float> A,Matrix<float> B,Matrix<float> C)
// 注意命名不要与前面的宏定义重名
const int BLOCK_M&#61;16;// block的行数
const int BLOCK_N&#61;16;// block的列数
const int BLOCK_K&#61;16;
// 沿着K维度循环加载一个block中对应的A和B的数据到共享内存
float c&#61;0.0;
for(int i&#61;0;i<A.cols/BLOCK_K;&#43;&#43;i)
// 每个block对应的全局内存中的A,B子块&#xff0c;即创建全局内存中A,B的view
Matrix<float> ASub(A.data&#43;blockIdx.y*BLOCK_M*A.strideOfRow&#43;i*BLOCK_K,BLOCK_M,BLOCK_K,A.strideOfRow,A.strideOfCol);
Matrix<float> BSub(B.data&#43;i*BLOCK_K*B.strideOfRow&#43;blockIdx.x*BLOCK_N,BLOCK_K,BLOCK_N,B.strideOfRow,B.strideOfCol);
// 将Asub,BSub加载到共享内存
// 注意&#xff1a;这里需要将一维逻辑索引转换为多维逻辑索引&#xff1a;stardIndex->(stardIndex/cols,stardIndex%cols)
__shared__ float A_Shared[BLOCK_M][BLOCK_K];
__shared__ float B_Shared[BLOCK_K][BLOCK_N];
int numberOfElementsPerThread&#61;(BLOCK_K*BLOCK_M)/(blockDim.x*blockDim.y);// 每个线程需要读取多少数据
int stardIndex&#61;numberOfElementsPerThread*(threadIdx.y*blockDim.x&#43;threadIdx.x);// stardIndex为每个线程读取的起始索引
for(int threadIndex&#61;0;threadIndex<numberOfElementsPerThread;&#43;&#43;threadIndex)
int logicalIndex&#61;stardIndex&#43;threadIndex;
A_Shared[logicalIndex/BLOCK_K][logicalIndex%BLOCK_K]&#61;ASub(logicalIndex/BLOCK_K,logicalIndex%BLOCK_K);
B_Shared[logicalIndex/BLOCK_N][logicalIndex%BLOCK_N]&#61;BSub(logicalIndex/BLOCK_N,logicalIndex%BLOCK_N);
__syncthreads();
// 每个thread计算A的一行和B的一列
for(int k&#61;0;k<BLOCK_K;&#43;&#43;k)
c&#43;&#61;A_Shared[threadIdx.y][k]*B_Shared[k][threadIdx.x];
__syncthreads();
// 将每个线程计算好的结果写回到C矩阵
// CSub为每个线程对应的全局内存的C矩阵子块&#xff0c;创建C矩阵的view
Matrix<float> CSub(C.data&#43;(blockIdx.y*BLOCK_M*C.strideOfRow&#43;blockIdx.x*BLOCK_N),BLOCK_M,BLOCK_N,C.strideOfRow,C.strideOfCol);
CSub(threadIdx.y,threadIdx.x)&#61;c;
但是这种实现方式依旧存在访存的问题&#xff1a;由于每个线程还是计算block中的一个元素&#xff0c;还是存在对共享内存的反复读取&#xff0c;虽然共享内存的速度要比全局内存快很多&#xff0c;但是如果矩阵规模很大&#xff0c;那这一块的访存开销还是很大。
参考Block分块的思想&#xff0c;我们让每个线程也计算一个子块&#xff0c;Thread分块的基本思想与Block分块的思想相同&#xff1a;每个线程计算一个子块&#xff0c;计算的时候先将每个线程对应的共享内存数据读取到寄存器中&#xff0c;然后再计算&#xff0c;由于寄存器数量非常有限&#xff0c;所以这里也不能一次性加载到寄存器中&#xff0c;所以也需要分批加载&#xff0c;为了只读取一遍共享内存&#xff0c;我们需要采用矩阵外积的计算形式&#xff1a;也就是每个线程计算子块的时候&#xff0c;读取A矩阵的一列和B矩阵的一行到寄存器&#xff0c;然后计算外积&#xff0c;这样就只需要读取一遍共享内存就可以了。

代码实现如下&#xff1a;
// 分块参数
#define BM 128 // block子块大小
#define BN 128
#define BK 8
#define TM 8 // thread子块大小
#define TN 8
__global__ void BlockGEMM_V2(Matrix<float> A,Matrix<float> B,Matrix<float> C)
// 每个线程的计算结果
float c[TM][TN]&#61;0.0;
float a[TM]&#61;0.0;
float b[TN]&#61;0.0;
// 沿着K维度循环加载一个block中对应的A和B的数据到共享内存
for(int i&#61;0;i<A.cols/BK;&#43;&#43;i)
// 每个block对应的全局内存中的A,B子块&#xff0c;即创建全局内存中A,B的view
Matrix<float> ASub(A.data&#43;blockIdx.y*BM*A.strideOfRow&#43;i*BK,BM,BK,A.strideOfRow,A.strideOfCol);
Matrix<float> BSub(B.data&#43;i*BK*B.strideOfRow&#43;blockIdx.x*BN,BK,BN,B.strideOfRow,B.strideOfCol);
// 将Asub,BSub加载到共享内存
// 以block为128&#xff0c;thread为8为例&#xff1a;由于一个block有16x16&#61;256个线程&#xff0c;而ASub和BSub中一共有1024个元素&#xff0c;所以每个线程加载4个元素
// 注意&#xff1a;这里需要将一维逻辑索引转换为多维逻辑索引&#xff1a;stardIndex->(stardIndex/cols,stardIndex%cols)
__shared__ float A_Shared[BM][BK];
__shared__ float B_Shared[BK][BN];
int numberOfElementsPerThread&#61;(BK*BM)/(blockDim.x*blockDim.y);// 每个线程需要读取多少数据
int stardIndex&#61;numberOfElementsPerThread*(threadIdx.y*blockDim.x&#43;threadIdx.x);// stardIndex为每个线程读取的起始索引
for(int threadIndex&#61;0;threadIndex<numberOfElementsPerThread;&#43;&#43;threadIndex)
int logicalIndex&#61;stardIndex&#43;threadIndex;
A_Shared[logicalIndex/BK][logicalIndex%BK]&#61;ASub(logicalIndex/BK,logicalIndex%BK);
B_Shared[logicalIndex/BN][logicalIndex%BN]&#61;BSub(logicalIndex/BN,logicalIndex%BN);
__syncthreads();
// 每个thread对应的共享内存中的A_Shared,B_Shared的子块&#xff0c;即创建A_Shared,B_Shared的view
Matrix<float> ASub_Shared((float *)A_Shared&#43;threadIdx.y*TM*BK,TM,BK,BK,1);// 每个线程对应的共享内存中A和B的子块
Matrix<float> BSub_Shared((float *)B_Shared&#43;threadIdx.x*TN,BK,TN,BN,1);
// 每个线程执行计算
for(int k&#61;0;k<BK;&#43;&#43;k)
// 先将A的一列和B的一行加载到寄存器
for(int m&#61;0;m<TM;&#43;&#43;m)
a[m]&#61;ASub_Shared(m,k);
for(int n&#61;0;n<TN;&#43;&#43;n)
b[n]&#61;BSub_Shared(k,n);
// 使用寄存器计算
for(int m&#61;0;m<TM;&#43;&#43;m)
for(int n&#61;0;n<TN;&#43;&#43;n)
c[m][n]&#43;&#61;a[m]*b[n];
__syncthreads();
// 将每个线程计算好的结果写回到C矩阵
// CSub为每个线程对应的全局内存的C矩阵子块&#xff0c;创建C矩阵的view
Matrix<float> CSub(C.data&#43;((blockIdx.y*BM&#43;threadIdx.y*TM)*C.strideOfRow&#43;blockIdx.x*BN&#43;threadIdx.x*TN),TM,TN,C.strideOfRow,C.strideOfCol);
for(int m&#61;0;m<TM;&#43;&#43;m)
for(int n&#61;0;n<TN;&#43;&#43;n)
CSub(m,n)&#61;c[m][n];
通过前面的优化相对于NaiveGEMM已经有了很大提高了。下面我们分析一下BlockGEMM_V2的实现&#xff0c;在CUTLASS官方博客中的Software Pipelining一节中提到了BlockGEMM_V2这种实现方式存在这样的问题&#xff1a;每个线程按照“访存1—计算1—访存2—计算2—…—访存n—计算n”的顺序执行&#xff0c;这种执行方式每次计算单元都需要等待访存&#xff0c;而访存的延迟通常都是比较大的&#xff0c;所以这种实现会存在较大的访存延迟&#xff0c;为了减少访存延迟&#xff0c;Software Pipelining一节中提到了将下一次访存和上一次计算并行&#xff0c;这样可以掩盖访存的延迟。

这种优化方式也叫数据预取。代码实现如下&#xff1a;
// 分块参数
#define BM 128 // block子块大小
#define BN 128
#define BK 8
#define TM 8 // thread子块大小
#define TN 8
__global__ void BlockGEMM_V3(Matrix<float> A,Matrix<float> B,Matrix<float> C)
// 每个线程的计算结果
float c[TM][TN]&#61;0.0;
float a[TM]&#61;0.0;
float b[TN]&#61;0.0;
// 此时需要的共享内存是原来的2倍
// 注意&#xff1a;读取和写入的时候第一个维度的索引是交错进行的
__shared__ float A_Shared[2][BM][BK];
__shared__ float B_Shared[2][BK][BN];
// 预取(先读取第一个BK)
Matrix<float> ASub(A.data&#43;blockIdx.y*BM*A.strideOfRow&#43;0*BK,BM,BK,A.strideOfRow,A.strideOfCol);
Matrix<float> BSub(B.data&#43;0*BK*B.strideOfRow&#43;blockIdx.x*BN,BK,BN,B.strideOfRow,B.strideOfCol);
int numberOfElementsPerThread&#61;(BK*BM)/(blockDim.x*blockDim.y);
int stardIndex&#61;numberOfElementsPerThread*(threadIdx.y*blockDim.x&#43;threadIdx.x);// stardIndex为每个线程读取的起始索引
for(int threadIndex&#61;0;threadIndex<numberOfElementsPerThread;&#43;&#43;threadIndex)
int logicalIndex&#61;stardIndex&#43;threadIndex;
A_Shared[0][logicalIndex/BK][logicalIndex%BK]&#61;ASub(logicalIndex/BK,logicalIndex%BK);
B_Shared[0][logicalIndex/BN][logicalIndex%BN]&#61;BSub(logicalIndex/BN,logicalIndex%BN);
__syncthreads();
// 沿着K维度循环加载剩下的数据
int indexOfRead,indexOfWrite;
bool indexFlag&#61;false;// 辅助变量&#xff0c;用来计算索引
for(int i&#61;1;i<A.cols/BK;&#43;&#43;i)
// 计算索引&#xff0c;indexOfRead和indexOfWrite每次循环会交替变换&#xff0c;i&#61;1时为indexOfRead&#61;0,indexOfWrite&#61;1&#xff0c;i&#61;2时为indexOfRead&#61;1,indexOfWrite&#61;0
indexOfRead &#61; (int)indexFlag; // 读索引&#xff0c;即本次循环读取A_Shared[indexOfRead,:,:]和B_Shared[indexOfRead,:,:]中的数据执行计算
indexOfWrite &#61; 1-indexOfRead; // 写索引&#xff0c;即预取下一次计算需要的数据到A_Shared[indexOfWrite,:,:]和B_Shared[indexOfWrite,:,:]中
// 每个线程执行计算
Matrix<float> ASub_Shared(((float *)A_Shared&#43;indexOfRead*BM*BK)




 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有